Akıllı yüzey doldurma
Sınıflandırma sonrası kalan boşlukları çevre noktalardan enterpolasyonla doldurur; binayı, bitkiyi ve nesneyi temizleyip boşluksuz, sürekli arazi yüzeyi bırakır — keskin şevleri koruyarak.
HRYSoftware, sahada karşılaştığımız gerçek sorunlardan doğdu: veriyi doğru işlemek, gereksiz iş yükünü ortadan kaldırmak ve haritacının ihtiyaç duyduğu spesifik çözümleri tek bir yerde toplamak. Amacımız basit — bu işleri kolaylaştırmak.

Bir LiDAR taraması binlerce şeyin karışımıdır: binalar, ağaçlar, araçlar, direkler… ve hepsinin altında saklı gerçek zemin. HRYScan bu kalabalığı tanır, ayıklar ve boşluksuz araziyi çıkarır.
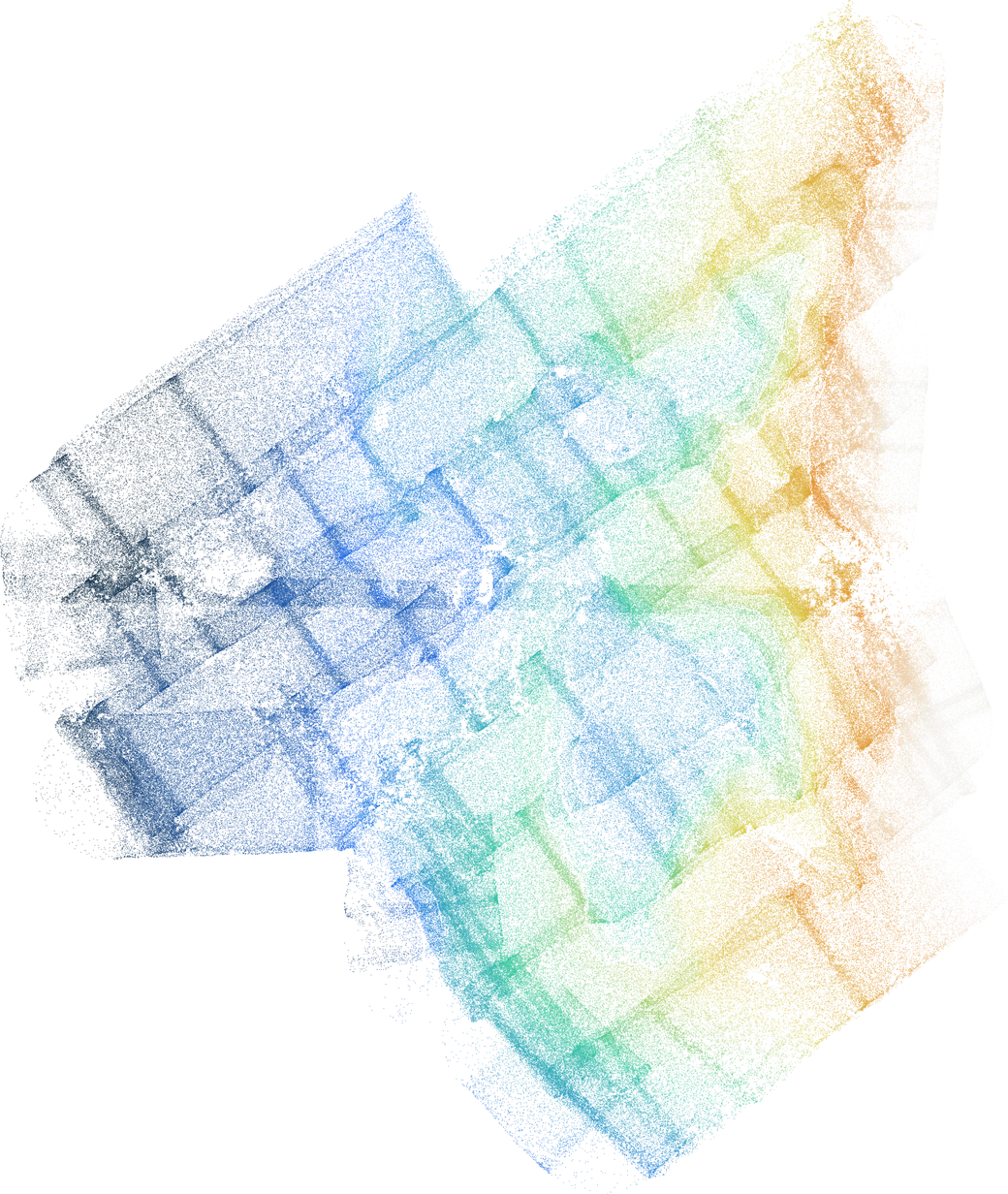
Ham tarama; zemin, bina, araç, direk ve bitki iç içe.
Zemin-dışı her nesne çok ölçekli motorla tanınır ve kaldırılır.
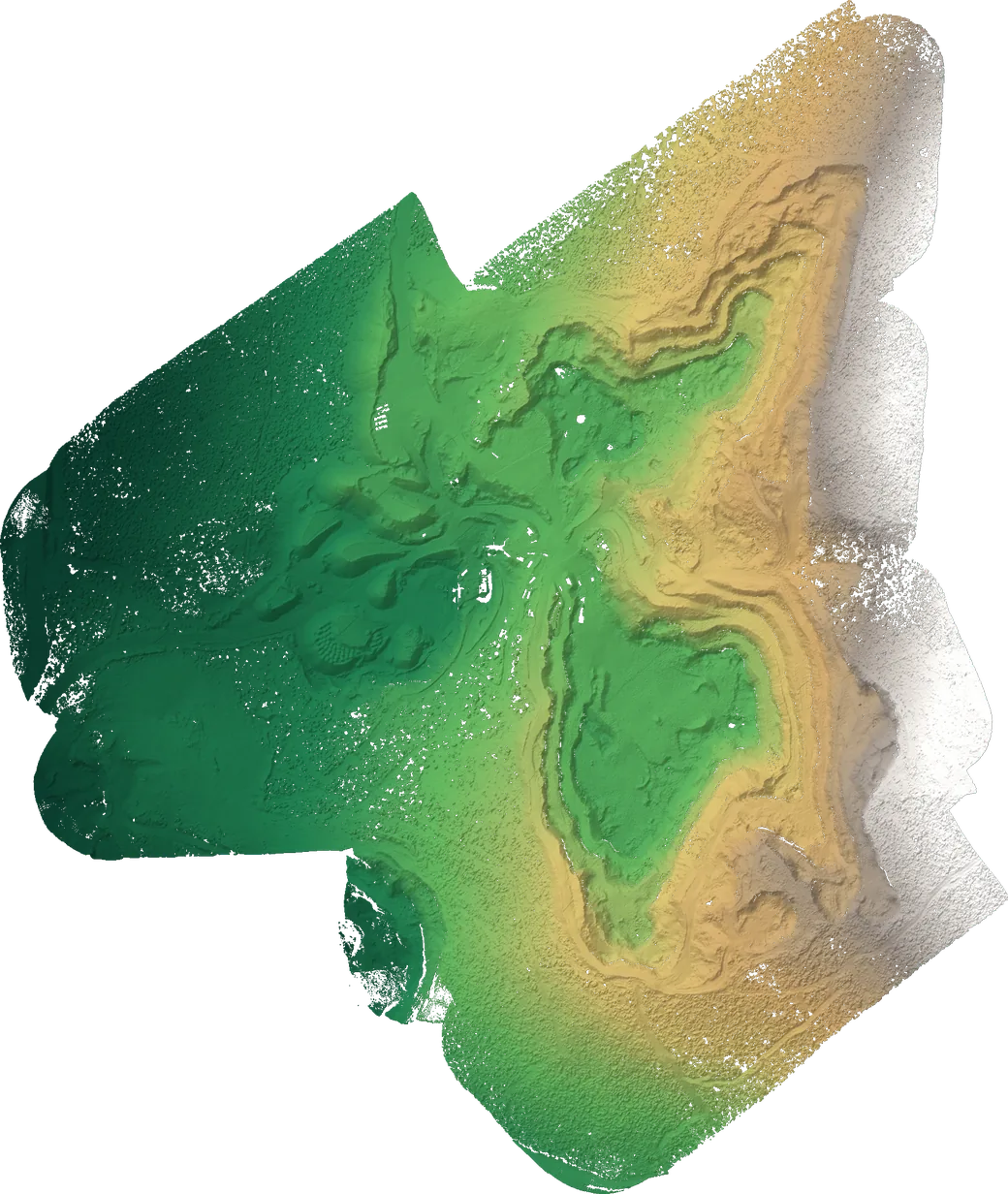
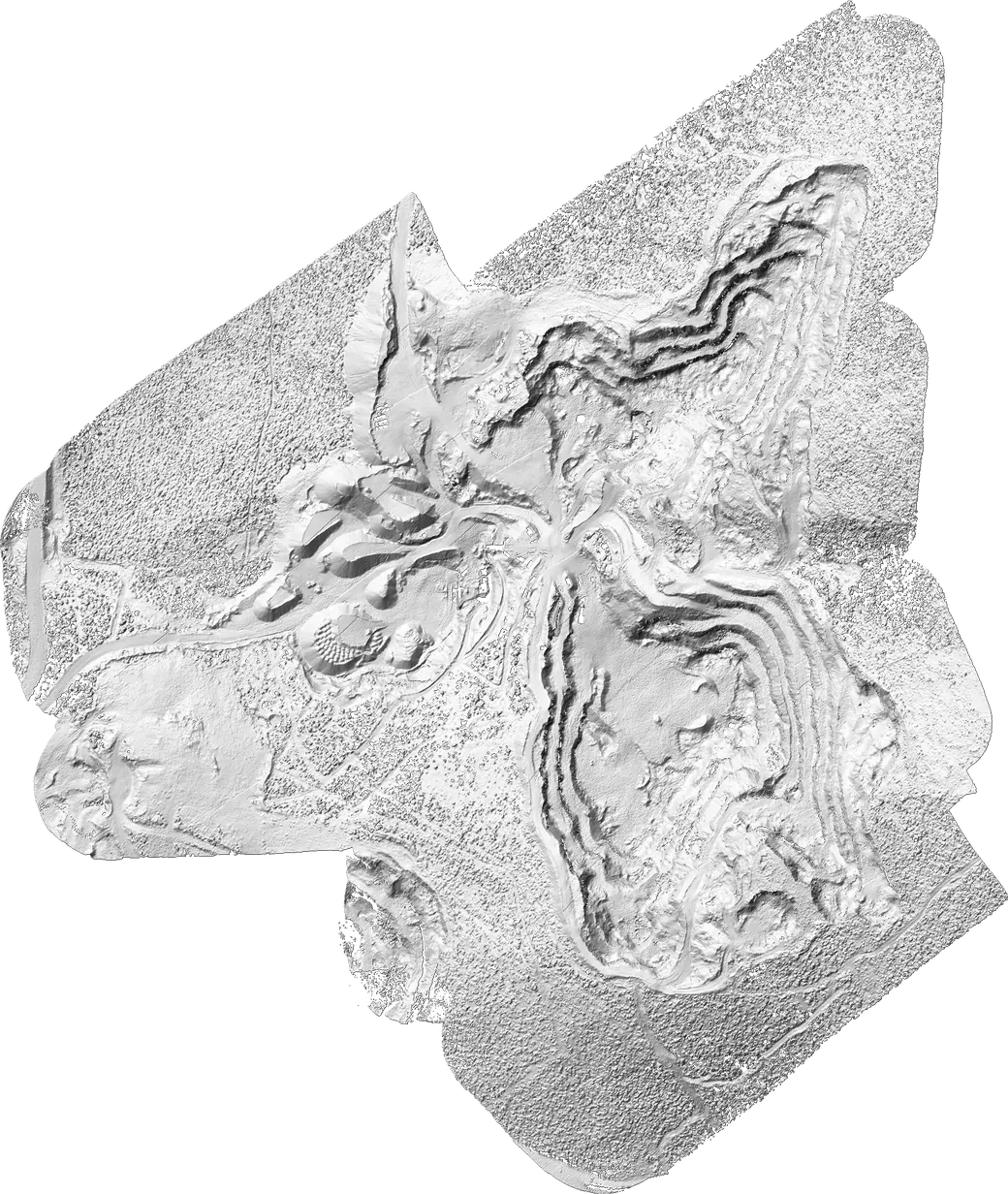
Şevler ve dağ yamaçları korunur; boşluklar enterpolasyonla dolar.
Ham nokta bulutundan teslim edilebilir çıktıya kadar her adım — tutarlı, hızlı ve modern bir arayüzde.
Sınıflandırma sonrası kalan boşlukları çevre noktalardan enterpolasyonla doldurur; binayı, bitkiyi ve nesneyi temizleyip boşluksuz, sürekli arazi yüzeyi bırakır — keskin şevleri koruyarak.
Projeksiyonsuz verilere koordinat sistemi atayın; veriyi ve KML/tahdit alanlarını arazinin projeksiyonuna (ör. TM27 / EPSG:5253) otomatik dönüştürün.
Program içinde ortomozaik üretin; kayık ortofotoyu araziye öteleyip hizalayın. RGB, kot ve eğim renk modlarında foto-gerçekçi harita.
Nokta, yüzey ve vektör katmanlarını aynı pencerede inceleyin; profil kesiti alın, ölçüm yapın ve manuel sınıflandırmayla düzenleyip dışa aktarın.
RINEX ve LiDAR verilerinden yoğunluk, kot dağılımı, sınıf ve kalite grafikleriyle otomatik profesyonel PDF rapor.
Alan sınırlarını KML olarak; yüzeyi .STL ile 3B yazıcıya hazır model olarak dışa aktarın. Saha verisinden fiziksel maket.
Verilerinizi tek HTML dosyası olarak paylaşın; alıcı, herhangi bir program kurmadan tarayıcıda 3B olarak açıp inceler.
Verileri LAZ ile sıkıştırıp saklayın; büyük sahaları parçalara bölün veya birleştirin, seyreltin ve otomatik nokta atın.
Ayrıca otonom yol ve şev tespiti modülleri geliştirme (deneysel) aşamasındadır; sürekli iyileştirilmektedir. Terimleri merak ediyorsanız Haritacılık Sözlüğü →
HRYScan'in kalbinde iki iş yapar: ham bulutun altındaki gerçek zemini çıkarır, sonra onu doğru yüksekliğe oturtur.
Bir nokta bulutu binlerce şeyin karışımıdır — binalar, ağaçlar, araçlar, çalılar... ve hepsinin altında saklı gerçek zemin. HRY8 motoru bu kalabalığı tanır ve ayıklar.
Çatıları, yamaç ağaçlarını ve izole yükseltileri ayıklar; ama dik şevleri, dağ yamaçlarını ve teras kenarlarını dokunmadan bırakır.
Sildiği her nesnenin ayak izini çevre araziden enterpolasyonla doldurur — tek nokta eksik kalmaz.
Küçük çalıdan geniş bina bloğuna; kentten dağa, ovadan terasa — çok ölçekli temizlik.
Haritacılar genellikle YKN/GPS alımlarının ortalamasını alır; HRYScan tek bir değer yerine tüm yüzeyi referans alır — deniz seviyesine göre doğru kot.
Eklenen YKN'ler ile elipsoidal yüzey düzeltmesi ortalama yoluyla değil, kalan farklar enterpolasyonla tüm yüzeye uygulanır.
TG-20 ortometrik kot yüzeyi, sıklaştırılmış nokta bulutundan üretilen yüzeye tüm yüzeyi referans alarak indirgenir.
Her noktada doğru ortometrik kot taşıyan yüzey + YKN artık-hatalarını ve dağılımını gösteren PDF doğrulama raporu.
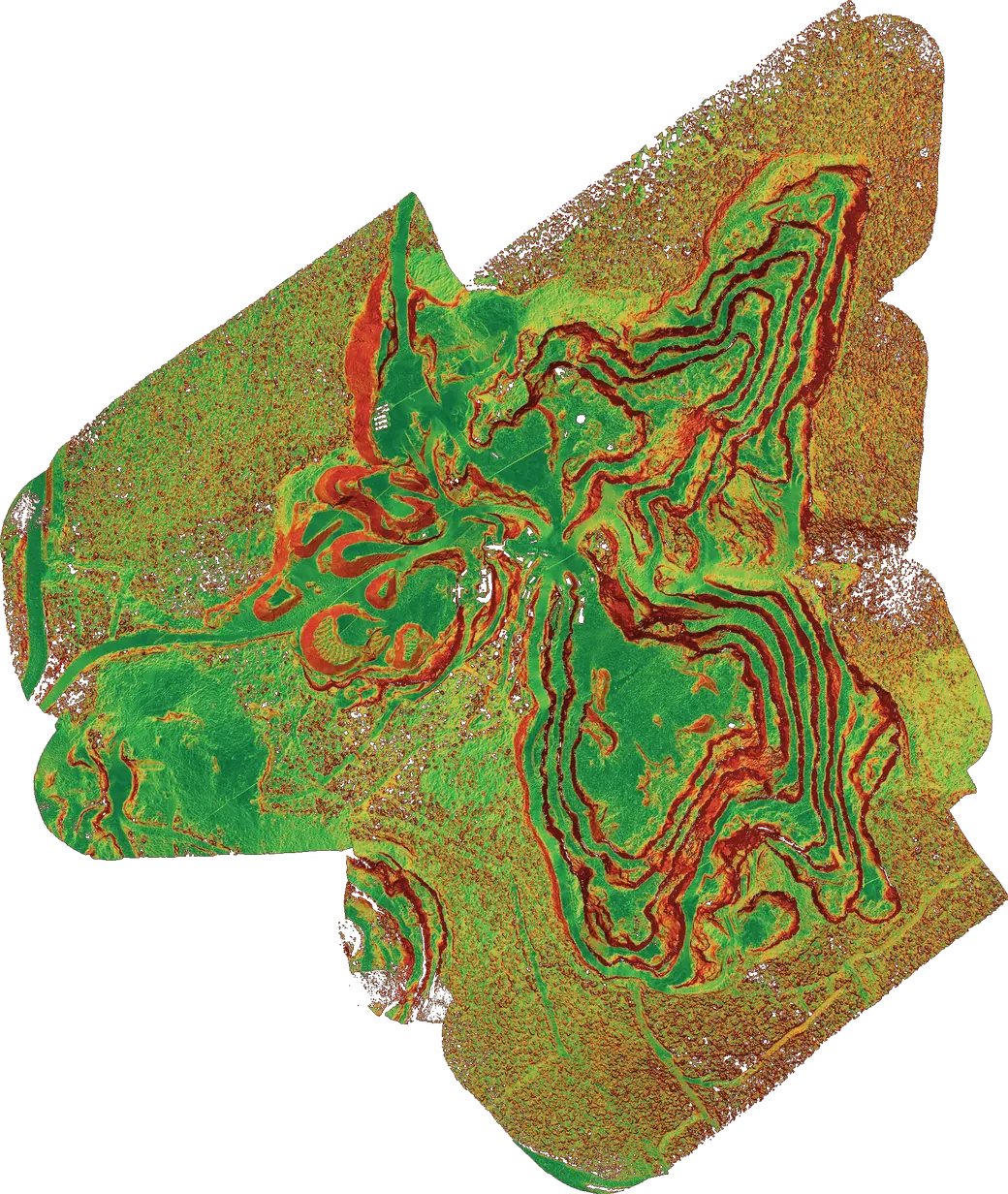
Tümü HRYScan ile, tek bir sahanın ham taramasından üretildi — ortofoto, kot, eğim ve nokta bulutu.
HRYScan, üretim hattının yayında olan ilk halkası. Aile; uçuş planlamadan teslimata kadar tüm süreci kapsayacak şekilde büyüyor.
Nokta bulutu işleme platformu: akıllı zemin sınıflandırma, sayısal arazi modeli, ortometrik kot indirgeme, projeksiyon dönüşümü, ortomozaik, 3B görüntüleme ve otomatik raporlama.
İHA marka/model, kamera-lens, hava durumu, rüzgâr ve uydu sayısı gibi yüzlerce parametreyle en uygun uçuş planını kurar; bindirme, GSD ve rota optimizasyonu, batarya/şarj öngörüsü.
Fotogrametri motoru: çakışan görüntülerden yüksek doğrulukta nokta bulutu, mesh ve dokulu 3B model üretimi — SfM hizalama, yoğunlaştırma ve ölçeklendirme.
3B model yüzeyleri üzerinde doğrudan çizim ve vektörleştirme; arazi üstünde CAD üretimi — kırık hatlar, kontur, alan ve hacim ölçümleri.
Uçuş sonrası verilere geotag (koordinat) atama ve PPK/trajektori son-işlemi; görüntü-konum eşleştirme ve kalite raporu.
LiDAR, nokta bulutu, DTM/DSM, ortofoto, ortomozaik, ortometrik kot, jeoid, EPSG, RINEX… Hem mesleğin hem de programlarımızın terimlerini sade Türkçeyle açıkladığımız sözlük.
Sözlüğü AçTek kurulum dosyası, ek bağımlılık yok. İlk açılışta lisanslı e-posta adresinizle giriş yaparsınız. Tüm ürünlerin güncel ve geçmiş sürümleri indirme sayfasında.